




Mempelajarilaserteknik penyelarasan
Memastikan keselarasan berkas laser adalah tugas utama dari proses penyelarasan. Hal ini mungkin memerlukan penggunaan optik tambahan seperti lensa atau kolimator serat optik, terutama untuk dioda atausumber laser seratSebelum melakukan penyelarasan laser, Anda harus memahami prosedur keselamatan laser dan memastikan bahwa Anda dilengkapi dengan kacamata keselamatan yang sesuai untuk memblokir panjang gelombang laser. Selain itu, untuk laser yang tidak terlihat, kartu deteksi mungkin diperlukan untuk membantu upaya penyelarasan.
Di dalampenyelarasan laserSudut dan posisi berkas cahaya perlu dikontrol secara bersamaan. Hal ini dapat memerlukan penggunaan beberapa optik, menambah kompleksitas pada pengaturan penyelarasan, dan dapat memakan banyak ruang di meja kerja. Namun, dengan dudukan kinematik, solusi yang sederhana dan efektif dapat diterapkan, terutama untuk aplikasi dengan keterbatasan ruang.
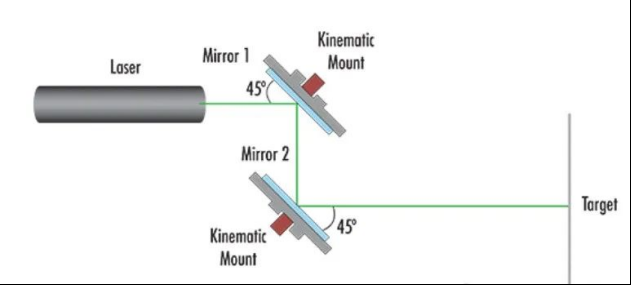
Gambar 1: Struktur paralel (lipatan Z)
Gambar 1 menunjukkan pengaturan dasar struktur Z-Fold dan menunjukkan alasan di balik namanya. Dua cermin yang dipasang pada dua dudukan kinematik digunakan untuk perpindahan sudut dan diposisikan sedemikian rupa sehingga berkas cahaya insiden mengenai permukaan cermin masing-masing pada sudut yang sama. Untuk menyederhanakan pengaturan, tempatkan kedua cermin pada sudut sekitar 45°. Dalam pengaturan ini, penyangga kinematik pertama digunakan untuk mendapatkan posisi vertikal dan horizontal berkas yang diinginkan, sedangkan penyangga kedua digunakan untuk mengkompensasi sudut. Struktur Z-Fold adalah metode yang disukai untuk mengarahkan beberapa berkas laser ke target yang sama. Ketika menggabungkan laser dengan panjang gelombang yang berbeda, satu atau lebih cermin mungkin perlu diganti dengan filter dikroik.
Untuk meminimalkan duplikasi dalam proses penyelarasan, laser dapat diselaraskan pada dua titik referensi terpisah. Garis bidik sederhana atau kartu putih yang ditandai dengan X adalah alat yang sangat berguna. Pertama, atur titik referensi pertama pada atau di dekat permukaan cermin 2, sedekat mungkin dengan target. Titik referensi kedua adalah target itu sendiri. Gunakan dudukan kinematik pertama untuk menyesuaikan posisi horizontal (X) dan vertikal (Y) berkas pada titik referensi awal sehingga sesuai dengan posisi target yang diinginkan. Setelah posisi ini tercapai, braket kinematik kedua digunakan untuk menyesuaikan offset sudut, mengarahkan berkas laser ke target sebenarnya. Cermin pertama digunakan untuk mendekati penyelarasan yang diinginkan, sedangkan cermin kedua digunakan untuk menyempurnakan penyelarasan titik referensi kedua atau target.
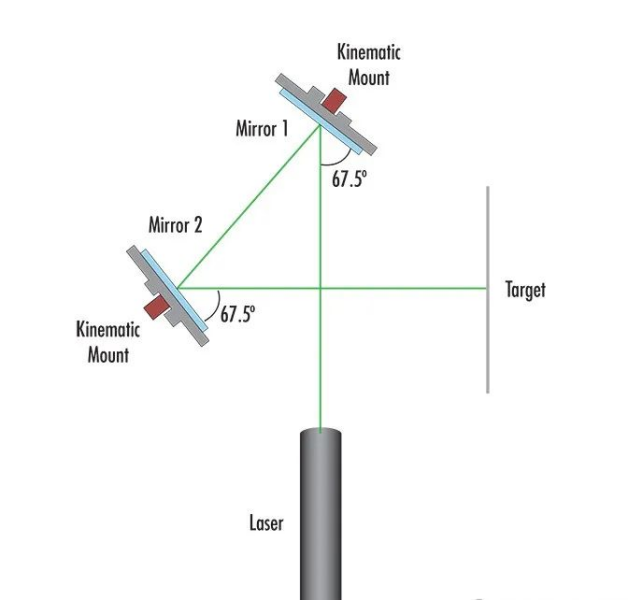
Gambar 2: Struktur vertikal (Gambar-4)
Struktur angka 4 lebih kompleks daripada struktur Z-Fold, tetapi dapat memberikan tata letak sistem yang lebih ringkas. Mirip dengan struktur Z-Fold, tata letak angka 4 menggunakan dua cermin yang dipasang pada braket yang dapat digerakkan. Namun, tidak seperti struktur Z-Fold, cermin dipasang pada sudut 67,5°, yang membentuk bentuk "4" dengan sinar laser (Gambar 2). Pengaturan ini memungkinkan reflektor 2 ditempatkan jauh dari jalur sinar laser sumber. Seperti halnya konfigurasi Z-Fold,sinar laserLaser harus disejajarkan pada dua titik referensi, titik referensi pertama pada cermin 2 dan titik referensi kedua pada target. Braket kinematik pertama diterapkan untuk memindahkan titik laser ke posisi XY yang diinginkan pada permukaan cermin kedua. Braket kinematik kedua kemudian harus digunakan untuk mengkompensasi perpindahan sudut dan menyempurnakan penyelarasan pada target.
Terlepas dari konfigurasi mana yang digunakan, mengikuti prosedur di atas akan meminimalkan jumlah iterasi yang diperlukan untuk mencapai hasil yang diinginkan. Dengan alat dan perlengkapan yang tepat serta beberapa kiat sederhana, penyelarasan laser dapat disederhanakan secara signifikan.
Waktu posting: 11 Maret 2024